公司動(dòng)態(tài)
西林叉車之--專利技術(shù)《叉車門(mén)架傾斜自動(dòng)控制裝
作者:西林叉車 時(shí)間:【 2019-12-12】 文章來(lái)源:
? ? 西林叉車之——專利技術(shù)《叉車門(mén)架傾斜自動(dòng)控制裝置》介紹
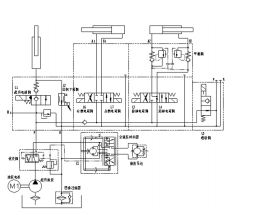
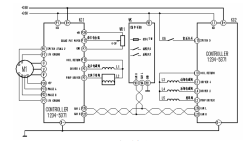
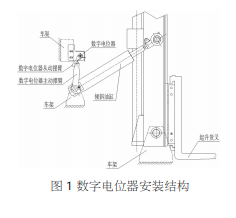
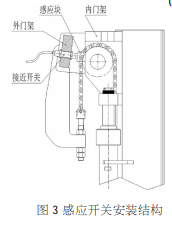
叉車門(mén)架傾斜自動(dòng)控制裝置,是公 司 2016 年 5 月獲得的一項(xiàng)發(fā)明專利。 常見(jiàn)的普通叉車多采用兩級(jí)門(mén)架, 兩級(jí)門(mén)架由內(nèi)門(mén)架和外門(mén)架組成,外門(mén) 架兩側(cè)設(shè)計(jì)有傾斜油缸,可使門(mén)架前傾 或后傾,便于叉車叉取和堆放貨物。 叉車一般以門(mén)架垂直位置為中心, 通過(guò)傾斜油缸控制門(mén)架向前或向后傾 斜,叉車在起升貨物時(shí),為了作業(yè)需要及 叉車運(yùn)行穩(wěn)定,需要通過(guò)駕駛員的操作 來(lái)調(diào)整門(mén)架的傾斜角度。但是現(xiàn)有叉車 沒(méi)有對(duì)門(mén)架的傾斜和起升高度作關(guān)聯(lián)性 的自動(dòng)控制,在作業(yè)時(shí)門(mén)架的傾斜控制 完全依賴于駕駛?cè)藛T操作經(jīng)驗(yàn),而叉車 載物起升的穩(wěn)定性與門(mén)架傾斜的角度大 小和貨物起升的高度有密切關(guān)系,特別 是當(dāng)門(mén)架處于最大前傾角度時(shí),隨著貨 物逐漸升高,叉車的重心發(fā)生偏移,這對(duì) 于缺乏經(jīng)驗(yàn)的駕駛?cè)藛T來(lái)說(shuō),當(dāng)接近或 超出極限時(shí)叉車極易發(fā)生傾翻、貨物跌 落等事故,對(duì)駕駛員的人身安全和貨物 安全造成威脅。 叉車門(mén)架傾斜自動(dòng)控制設(shè)計(jì)旨在解 決上述叉車技術(shù)現(xiàn)狀,課題來(lái)自于某國(guó) 某公司對(duì) CPD20SR 站駕式雙前驅(qū)平衡 重式叉車的設(shè)計(jì)要求,即叉車門(mén)架最大 后傾角度為 6 度,最大前傾角度為 5 度, 且當(dāng)貨叉高度位于 1500mm 以下時(shí),允 許門(mén)架最大前傾 5 度,當(dāng)貨叉高度位于 1500mm 以上時(shí),允許門(mén)架最大前傾 2 度,完全由程序控制。且在貨叉高度位于 1500mm 以下,門(mén)架傾斜大于 2 度時(shí)起 升貨叉,當(dāng)貨叉起升越過(guò) 1500mm 高度 時(shí),起升自動(dòng)停止,門(mén)架自動(dòng)向后傾斜, 直至門(mén)架處于垂直位置時(shí)停止(這一過(guò) 程定義為門(mén)架自動(dòng)糾直),貨叉繼續(xù)起 升直至所需高度。從而實(shí)現(xiàn)了門(mén)架傾斜 的自動(dòng)控制,提高了叉車運(yùn)行的穩(wěn)定性 和作業(yè)的可靠性。 1. 結(jié)構(gòu)設(shè)計(jì)與要求 為了實(shí)現(xiàn)門(mén)架傾斜自動(dòng)控制,電氣 控制設(shè)計(jì)要求采集門(mén)架在傾斜過(guò)程中的 角度變化信號(hào),并轉(zhuǎn)換成電變化信號(hào)。從 而選用數(shù)字電位器安裝在叉車車架上, 數(shù)字電位器連接一從動(dòng)擺臂,在傾斜油缸的車架一端轉(zhuǎn)軸上安裝了一數(shù)字電位 器主動(dòng)擺臂,當(dāng)油缸伸縮時(shí)門(mén)架的前后 傾斜帶動(dòng)數(shù)字電位器的主動(dòng)擺臂在一定 角度范圍內(nèi)旋轉(zhuǎn),同時(shí)帶動(dòng)數(shù)字電位器 的從動(dòng)擺臂旋轉(zhuǎn),實(shí)現(xiàn)了將門(mén)架傾斜的 角度變化轉(zhuǎn)換成了對(duì)應(yīng)的電位器電位信 號(hào),如圖 1 所示。 AM38—V05—45T 為三端數(shù)字電位 器,它的輸出電壓范圍為 0—5V,是一種 磁感應(yīng)的霍爾電位器,它的特點(diǎn)是可以 根據(jù)實(shí)際需要,通過(guò)編程來(lái)實(shí)現(xiàn)電壓范 圍與電位器旋轉(zhuǎn)角度的對(duì)應(yīng)關(guān)系。 安裝在車架上的數(shù)字電位器在門(mén)架 最大前、后傾斜時(shí)轉(zhuǎn)動(dòng)的角度可以根據(jù) 實(shí)際測(cè)量獲得,本車型門(mén)架從后傾 6 度 角到前傾 5 度角轉(zhuǎn)動(dòng)時(shí), 對(duì)應(yīng)的數(shù)字電 位器旋轉(zhuǎn)角度為 30 度左右, 考慮到安裝 誤差等因素將角度范圍放寬至 45 度,且 順時(shí)針?lè)较驗(yàn)殡妷哼f增,其輸出電壓與 旋轉(zhuǎn)角度的對(duì)應(yīng)值,如圖 2 所示。 門(mén)架傾斜自動(dòng)控制的高度點(diǎn)根據(jù)不 同車型的穩(wěn)定性加以確定,本設(shè)計(jì)要求 貨叉起升至 1500mm 高度時(shí)門(mén)架自動(dòng)糾 直。結(jié)構(gòu)設(shè)計(jì)通過(guò)安裝在外門(mén)架頂端上 的接近開(kāi)關(guān)和焊接在內(nèi)門(mén)架上的金屬感 應(yīng)塊來(lái)實(shí)現(xiàn)。其工作原理是當(dāng)貨叉起升 至 1500mm 高度時(shí),內(nèi)門(mén)架的金屬感應(yīng) 塊正好升至接近開(kāi)關(guān),使接近開(kāi)關(guān)從開(kāi) 狀態(tài)轉(zhuǎn)變至閉狀態(tài),從而將開(kāi)關(guān)變化信 號(hào)輸出給控制器,如圖 3 所示。2. 電氣控制設(shè)計(jì)原理 整機(jī)采用了三個(gè) CURTIS1234-5371 變頻交流控制器,一個(gè)用于液壓起升油泵 控制,另二個(gè)用于行走驅(qū)動(dòng)控制,車型為 雙前驅(qū)四支點(diǎn)叉車,叉車的功能包括貨叉 調(diào)速起升下降、貨叉左右側(cè)移、門(mén)架前后 傾斜等,其中涉及門(mén)架傾斜控制和起升部 分電路,如圖 4 所示。 圖中集中手柄 WK 集合了行走加速 器、起升下降加速器、貨叉左右側(cè)移開(kāi)關(guān)、 門(mén)架前后傾斜開(kāi)關(guān)、喇叭開(kāi)關(guān)等,并通過(guò) CAN 總線與油泵控制器 KC1 和行走控 制器 KC2 連接。 數(shù)字電位器 WR1 與油泵控制器的 P7、P17 和 P26 引腳相連接,接近開(kāi)關(guān) K6 與行走控制器的 L11 引腳相連。 電路設(shè)計(jì)原理是通過(guò)行走控制器程 序,識(shí)別來(lái)自接近開(kāi)關(guān) K6 的開(kāi)關(guān)信號(hào),首 先作出高度判斷。同時(shí)通過(guò)油泵控制器程 序,采集門(mén)架傾斜時(shí)來(lái)自數(shù)字電位器的輸 入電壓,并計(jì)算相應(yīng)的門(mén)架角度。當(dāng)開(kāi)關(guān) 處于開(kāi)狀態(tài)時(shí),貨叉的高度低于 1500 mm,忽略門(mén)架傾斜角度,允許門(mén)架最大前 傾、后傾。當(dāng)開(kāi)關(guān)處于閉狀態(tài)時(shí),貨叉的高 度高于 1500 mm,程序?qū)^(qū)分是前傾還是 后傾,在門(mén)架作后傾動(dòng)作時(shí),同樣忽略門(mén) 架角度,允許門(mén)架最大后傾,在門(mén)架作前 傾動(dòng)作時(shí),將對(duì)門(mén)架傾斜角度的計(jì)算結(jié)果 進(jìn)行判斷,當(dāng)門(mén)架的傾斜角度達(dá)到 2 度 時(shí),控制器將中斷油泵電機(jī)的工作,門(mén)架 傾斜被控制在 2 度以內(nèi)。 CURTIS1234-5371 變頻交流控制器 的特點(diǎn)是,除了底層固化的速度控制程序 外,還可以根據(jù)車型功能的需要進(jìn)行二次 開(kāi)發(fā)。電路設(shè)計(jì)與軟件開(kāi)發(fā)相結(jié)合,對(duì)叉 車門(mén)架傾斜自動(dòng)控制過(guò)程中出現(xiàn)的另一 種狀況(門(mén)架自動(dòng)糾直)進(jìn)行控制。 當(dāng)貨叉低于 1500 mm 高度,而門(mén)架的 前傾角度已大于 2 度時(shí),貨叉作起升動(dòng) 作,越過(guò) 1500 mm 高度,使原來(lái)處于開(kāi)狀 態(tài)的接近開(kāi)關(guān) K6 轉(zhuǎn)變?yōu)殚]狀態(tài),由于設(shè) 計(jì)要求貨叉在超過(guò) 1500 mm 高度時(shí),門(mén)架 傾斜角度不能大于 2 度,所以控制器將自 動(dòng)中斷起升,緊接著作門(mén)架后傾動(dòng)作,當(dāng) 門(mén)架傾斜到達(dá)垂直位置時(shí)(門(mén)架傾斜角度 為 0 度),中斷傾斜動(dòng)作,繼續(xù)起升,直至 貨叉到達(dá)所需高度。 3. 液壓系統(tǒng)原理 如圖 5 所示,為整機(jī)液壓系統(tǒng)工作原 理。包含了貨叉起升、側(cè)移,門(mén)架前傾、后 傾和液壓助力轉(zhuǎn)向。 貨叉起升時(shí),油泵電機(jī) M1、起升電磁 閥 L1 通電。門(mén)架前傾時(shí),油泵電機(jī) M1、前 傾電磁閥 L3 通電。門(mén)架后傾時(shí),油泵電機(jī) M1、后傾電磁閥 L4 通電。 在集中手柄 WK 操縱下,在作貨叉起 升、門(mén)架前傾、后傾過(guò)程中,控制器根據(jù)來(lái) 自于接近開(kāi)關(guān) K6 和數(shù)字電位器 WR1 的 輸入信號(hào)狀況,通過(guò)軟件來(lái)控制油泵電機(jī)和電磁閥的通電和斷電。 例如:門(mén)架自動(dòng)糾直,在接近開(kāi)關(guān) K6 處 于 開(kāi) 狀 態(tài) 下 ( 貨 叉 高 度 低 于 1500 mm),門(mén)架前傾已大于 2 度角,這時(shí)貨叉 起升,油泵電機(jī) M1、起升電磁閥 L1 通電, 當(dāng)貨叉高度越過(guò) 1500 mm 時(shí),接近開(kāi)關(guān) K6 閉合,起升電磁閥 L1 斷電,起升停止, 同時(shí)后傾電磁閥 L4 通電,門(mén)架后傾,直至 控制器獲取來(lái)自數(shù)字電位器中位的信號(hào) (門(mén)架傾斜角度為 0 度),后傾電磁閥斷 電,起升電磁閥繼續(xù)通電,直至需要高度。 4. 軟件的實(shí)現(xiàn) 根據(jù)電氣控制設(shè)計(jì)原理,相應(yīng)功能的 軟件實(shí)現(xiàn)如下: Joystick_ Lift_ Pot_ Lift = On (有起升 信號(hào)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw < Par_ Tilt_ Down_ Two_ Degree_ Min (門(mén)架角度小于 2°) Fork_ Control_ Status = 1(貨叉狀態(tài) 設(shè)為 1,允許后傾狀態(tài)) Joystick_ Lift_ Pot_ Lift = On (有起升 信號(hào)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw < Par_ Vertical_ Min (門(mén) 架角度小于 0°) Fork_ Control_ Status = 1(貨叉狀態(tài) 設(shè)為 1) Fork_ Control_ Status = 2(貨叉狀態(tài) 設(shè)為 2,允許后傾狀態(tài)) Joystick_ Lift_ Pot_ Lift = On (有起升 信號(hào)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw > Par_ Vertical_ Min (門(mén) 架角度大于 0°) Fork_ Control_ Status = 2(貨叉狀態(tài) 設(shè)為 2) 或者 Gantry_ Switch_ Flag_ to_ Pump = Off (碰到接近開(kāi)關(guān)) Fork_ Control_ Status = 3(貨叉狀態(tài) 設(shè)為 3,初始狀態(tài)和允許起升狀態(tài)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw > Par_ Tilt_ Down_ Two_ Degree_ Max (門(mén)架角度大 于 2°) Fork_ Control_ Status = 3(貨叉狀態(tài)設(shè)為 3) Fork_ Control_ Status = 4 (貨叉狀態(tài)設(shè)為 4,允 許起升狀態(tài))
?
叉車門(mén)架傾斜自動(dòng)控制裝置,是公 司 2016 年 5 月獲得的一項(xiàng)發(fā)明專利。 常見(jiàn)的普通叉車多采用兩級(jí)門(mén)架, 兩級(jí)門(mén)架由內(nèi)門(mén)架和外門(mén)架組成,外門(mén) 架兩側(cè)設(shè)計(jì)有傾斜油缸,可使門(mén)架前傾 或后傾,便于叉車叉取和堆放貨物。 叉車一般以門(mén)架垂直位置為中心, 通過(guò)傾斜油缸控制門(mén)架向前或向后傾 斜,叉車在起升貨物時(shí),為了作業(yè)需要及 叉車運(yùn)行穩(wěn)定,需要通過(guò)駕駛員的操作 來(lái)調(diào)整門(mén)架的傾斜角度。但是現(xiàn)有叉車 沒(méi)有對(duì)門(mén)架的傾斜和起升高度作關(guān)聯(lián)性 的自動(dòng)控制,在作業(yè)時(shí)門(mén)架的傾斜控制 完全依賴于駕駛?cè)藛T操作經(jīng)驗(yàn),而叉車 載物起升的穩(wěn)定性與門(mén)架傾斜的角度大 小和貨物起升的高度有密切關(guān)系,特別 是當(dāng)門(mén)架處于最大前傾角度時(shí),隨著貨 物逐漸升高,叉車的重心發(fā)生偏移,這對(duì) 于缺乏經(jīng)驗(yàn)的駕駛?cè)藛T來(lái)說(shuō),當(dāng)接近或 超出極限時(shí)叉車極易發(fā)生傾翻、貨物跌 落等事故,對(duì)駕駛員的人身安全和貨物 安全造成威脅。 叉車門(mén)架傾斜自動(dòng)控制設(shè)計(jì)旨在解 決上述叉車技術(shù)現(xiàn)狀,課題來(lái)自于某國(guó) 某公司對(duì) CPD20SR 站駕式雙前驅(qū)平衡 重式叉車的設(shè)計(jì)要求,即叉車門(mén)架最大 后傾角度為 6 度,最大前傾角度為 5 度, 且當(dāng)貨叉高度位于 1500mm 以下時(shí),允 許門(mén)架最大前傾 5 度,當(dāng)貨叉高度位于 1500mm 以上時(shí),允許門(mén)架最大前傾 2 度,完全由程序控制。且在貨叉高度位于 1500mm 以下,門(mén)架傾斜大于 2 度時(shí)起 升貨叉,當(dāng)貨叉起升越過(guò) 1500mm 高度 時(shí),起升自動(dòng)停止,門(mén)架自動(dòng)向后傾斜, 直至門(mén)架處于垂直位置時(shí)停止(這一過(guò) 程定義為門(mén)架自動(dòng)糾直),貨叉繼續(xù)起 升直至所需高度。從而實(shí)現(xiàn)了門(mén)架傾斜 的自動(dòng)控制,提高了叉車運(yùn)行的穩(wěn)定性 和作業(yè)的可靠性。 1. 結(jié)構(gòu)設(shè)計(jì)與要求 為了實(shí)現(xiàn)門(mén)架傾斜自動(dòng)控制,電氣 控制設(shè)計(jì)要求采集門(mén)架在傾斜過(guò)程中的 角度變化信號(hào),并轉(zhuǎn)換成電變化信號(hào)。從 而選用數(shù)字電位器安裝在叉車車架上, 數(shù)字電位器連接一從動(dòng)擺臂,在傾斜油缸的車架一端轉(zhuǎn)軸上安裝了一數(shù)字電位 器主動(dòng)擺臂,當(dāng)油缸伸縮時(shí)門(mén)架的前后 傾斜帶動(dòng)數(shù)字電位器的主動(dòng)擺臂在一定 角度范圍內(nèi)旋轉(zhuǎn),同時(shí)帶動(dòng)數(shù)字電位器 的從動(dòng)擺臂旋轉(zhuǎn),實(shí)現(xiàn)了將門(mén)架傾斜的 角度變化轉(zhuǎn)換成了對(duì)應(yīng)的電位器電位信 號(hào),如圖 1 所示。 AM38—V05—45T 為三端數(shù)字電位 器,它的輸出電壓范圍為 0—5V,是一種 磁感應(yīng)的霍爾電位器,它的特點(diǎn)是可以 根據(jù)實(shí)際需要,通過(guò)編程來(lái)實(shí)現(xiàn)電壓范 圍與電位器旋轉(zhuǎn)角度的對(duì)應(yīng)關(guān)系。 安裝在車架上的數(shù)字電位器在門(mén)架 最大前、后傾斜時(shí)轉(zhuǎn)動(dòng)的角度可以根據(jù) 實(shí)際測(cè)量獲得,本車型門(mén)架從后傾 6 度 角到前傾 5 度角轉(zhuǎn)動(dòng)時(shí), 對(duì)應(yīng)的數(shù)字電 位器旋轉(zhuǎn)角度為 30 度左右, 考慮到安裝 誤差等因素將角度范圍放寬至 45 度,且 順時(shí)針?lè)较驗(yàn)殡妷哼f增,其輸出電壓與 旋轉(zhuǎn)角度的對(duì)應(yīng)值,如圖 2 所示。 門(mén)架傾斜自動(dòng)控制的高度點(diǎn)根據(jù)不 同車型的穩(wěn)定性加以確定,本設(shè)計(jì)要求 貨叉起升至 1500mm 高度時(shí)門(mén)架自動(dòng)糾 直。結(jié)構(gòu)設(shè)計(jì)通過(guò)安裝在外門(mén)架頂端上 的接近開(kāi)關(guān)和焊接在內(nèi)門(mén)架上的金屬感 應(yīng)塊來(lái)實(shí)現(xiàn)。其工作原理是當(dāng)貨叉起升 至 1500mm 高度時(shí),內(nèi)門(mén)架的金屬感應(yīng) 塊正好升至接近開(kāi)關(guān),使接近開(kāi)關(guān)從開(kāi) 狀態(tài)轉(zhuǎn)變至閉狀態(tài),從而將開(kāi)關(guān)變化信 號(hào)輸出給控制器,如圖 3 所示。2. 電氣控制設(shè)計(jì)原理 整機(jī)采用了三個(gè) CURTIS1234-5371 變頻交流控制器,一個(gè)用于液壓起升油泵 控制,另二個(gè)用于行走驅(qū)動(dòng)控制,車型為 雙前驅(qū)四支點(diǎn)叉車,叉車的功能包括貨叉 調(diào)速起升下降、貨叉左右側(cè)移、門(mén)架前后 傾斜等,其中涉及門(mén)架傾斜控制和起升部 分電路,如圖 4 所示。 圖中集中手柄 WK 集合了行走加速 器、起升下降加速器、貨叉左右側(cè)移開(kāi)關(guān)、 門(mén)架前后傾斜開(kāi)關(guān)、喇叭開(kāi)關(guān)等,并通過(guò) CAN 總線與油泵控制器 KC1 和行走控 制器 KC2 連接。 數(shù)字電位器 WR1 與油泵控制器的 P7、P17 和 P26 引腳相連接,接近開(kāi)關(guān) K6 與行走控制器的 L11 引腳相連。 電路設(shè)計(jì)原理是通過(guò)行走控制器程 序,識(shí)別來(lái)自接近開(kāi)關(guān) K6 的開(kāi)關(guān)信號(hào),首 先作出高度判斷。同時(shí)通過(guò)油泵控制器程 序,采集門(mén)架傾斜時(shí)來(lái)自數(shù)字電位器的輸 入電壓,并計(jì)算相應(yīng)的門(mén)架角度。當(dāng)開(kāi)關(guān) 處于開(kāi)狀態(tài)時(shí),貨叉的高度低于 1500 mm,忽略門(mén)架傾斜角度,允許門(mén)架最大前 傾、后傾。當(dāng)開(kāi)關(guān)處于閉狀態(tài)時(shí),貨叉的高 度高于 1500 mm,程序?qū)^(qū)分是前傾還是 后傾,在門(mén)架作后傾動(dòng)作時(shí),同樣忽略門(mén) 架角度,允許門(mén)架最大后傾,在門(mén)架作前 傾動(dòng)作時(shí),將對(duì)門(mén)架傾斜角度的計(jì)算結(jié)果 進(jìn)行判斷,當(dāng)門(mén)架的傾斜角度達(dá)到 2 度 時(shí),控制器將中斷油泵電機(jī)的工作,門(mén)架 傾斜被控制在 2 度以內(nèi)。 CURTIS1234-5371 變頻交流控制器 的特點(diǎn)是,除了底層固化的速度控制程序 外,還可以根據(jù)車型功能的需要進(jìn)行二次 開(kāi)發(fā)。電路設(shè)計(jì)與軟件開(kāi)發(fā)相結(jié)合,對(duì)叉 車門(mén)架傾斜自動(dòng)控制過(guò)程中出現(xiàn)的另一 種狀況(門(mén)架自動(dòng)糾直)進(jìn)行控制。 當(dāng)貨叉低于 1500 mm 高度,而門(mén)架的 前傾角度已大于 2 度時(shí),貨叉作起升動(dòng) 作,越過(guò) 1500 mm 高度,使原來(lái)處于開(kāi)狀 態(tài)的接近開(kāi)關(guān) K6 轉(zhuǎn)變?yōu)殚]狀態(tài),由于設(shè) 計(jì)要求貨叉在超過(guò) 1500 mm 高度時(shí),門(mén)架 傾斜角度不能大于 2 度,所以控制器將自 動(dòng)中斷起升,緊接著作門(mén)架后傾動(dòng)作,當(dāng) 門(mén)架傾斜到達(dá)垂直位置時(shí)(門(mén)架傾斜角度 為 0 度),中斷傾斜動(dòng)作,繼續(xù)起升,直至 貨叉到達(dá)所需高度。 3. 液壓系統(tǒng)原理 如圖 5 所示,為整機(jī)液壓系統(tǒng)工作原 理。包含了貨叉起升、側(cè)移,門(mén)架前傾、后 傾和液壓助力轉(zhuǎn)向。 貨叉起升時(shí),油泵電機(jī) M1、起升電磁 閥 L1 通電。門(mén)架前傾時(shí),油泵電機(jī) M1、前 傾電磁閥 L3 通電。門(mén)架后傾時(shí),油泵電機(jī) M1、后傾電磁閥 L4 通電。 在集中手柄 WK 操縱下,在作貨叉起 升、門(mén)架前傾、后傾過(guò)程中,控制器根據(jù)來(lái) 自于接近開(kāi)關(guān) K6 和數(shù)字電位器 WR1 的 輸入信號(hào)狀況,通過(guò)軟件來(lái)控制油泵電機(jī)和電磁閥的通電和斷電。 例如:門(mén)架自動(dòng)糾直,在接近開(kāi)關(guān) K6 處 于 開(kāi) 狀 態(tài) 下 ( 貨 叉 高 度 低 于 1500 mm),門(mén)架前傾已大于 2 度角,這時(shí)貨叉 起升,油泵電機(jī) M1、起升電磁閥 L1 通電, 當(dāng)貨叉高度越過(guò) 1500 mm 時(shí),接近開(kāi)關(guān) K6 閉合,起升電磁閥 L1 斷電,起升停止, 同時(shí)后傾電磁閥 L4 通電,門(mén)架后傾,直至 控制器獲取來(lái)自數(shù)字電位器中位的信號(hào) (門(mén)架傾斜角度為 0 度),后傾電磁閥斷 電,起升電磁閥繼續(xù)通電,直至需要高度。 4. 軟件的實(shí)現(xiàn) 根據(jù)電氣控制設(shè)計(jì)原理,相應(yīng)功能的 軟件實(shí)現(xiàn)如下: Joystick_ Lift_ Pot_ Lift = On (有起升 信號(hào)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw < Par_ Tilt_ Down_ Two_ Degree_ Min (門(mén)架角度小于 2°) Fork_ Control_ Status = 1(貨叉狀態(tài) 設(shè)為 1,允許后傾狀態(tài)) Joystick_ Lift_ Pot_ Lift = On (有起升 信號(hào)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw < Par_ Vertical_ Min (門(mén) 架角度小于 0°) Fork_ Control_ Status = 1(貨叉狀態(tài) 設(shè)為 1) Fork_ Control_ Status = 2(貨叉狀態(tài) 設(shè)為 2,允許后傾狀態(tài)) Joystick_ Lift_ Pot_ Lift = On (有起升 信號(hào)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw > Par_ Vertical_ Min (門(mén) 架角度大于 0°) Fork_ Control_ Status = 2(貨叉狀態(tài) 設(shè)為 2) 或者 Gantry_ Switch_ Flag_ to_ Pump = Off (碰到接近開(kāi)關(guān)) Fork_ Control_ Status = 3(貨叉狀態(tài) 設(shè)為 3,初始狀態(tài)和允許起升狀態(tài)) Gantry_ Switch_ Flag_ to_ Pump = Off (未碰到接近開(kāi)關(guān)) Pot2_ Raw > Par_ Tilt_ Down_ Two_ Degree_ Max (門(mén)架角度大 于 2°) Fork_ Control_ Status = 3(貨叉狀態(tài)設(shè)為 3) Fork_ Control_ Status = 4 (貨叉狀態(tài)設(shè)為 4,允 許起升狀態(tài))
?
文章熱詞:西林叉車: